
Uber je celosvětově známá firma především pro jejich alternativní taxi službu, v Čechách se do širšího povědomí dostala také díky konfliktu s taxikáři v okolí letiště Ruzyně. Nicméně ve Spojených státech, konkrétně v San Franciscu a Pittsburghu, testuje Uber také svá samoříditelná auta. Tyto dvě města byla pro testování vybrána účelně, protože na rozdíl například od New Yorku či Chicaga se nejedná o města s pravidelným gridem ulic, ale s pestrou uliční sítí plnou kopců, mostů a úzkých uliček. Dalším z důvodů, proč je Uber Advanced Technologies Center (ATC) právě v Pittsburghu, je propojení na jednu z nejlepších univerzit v oblasti robotiky – Carnegie Melon University.

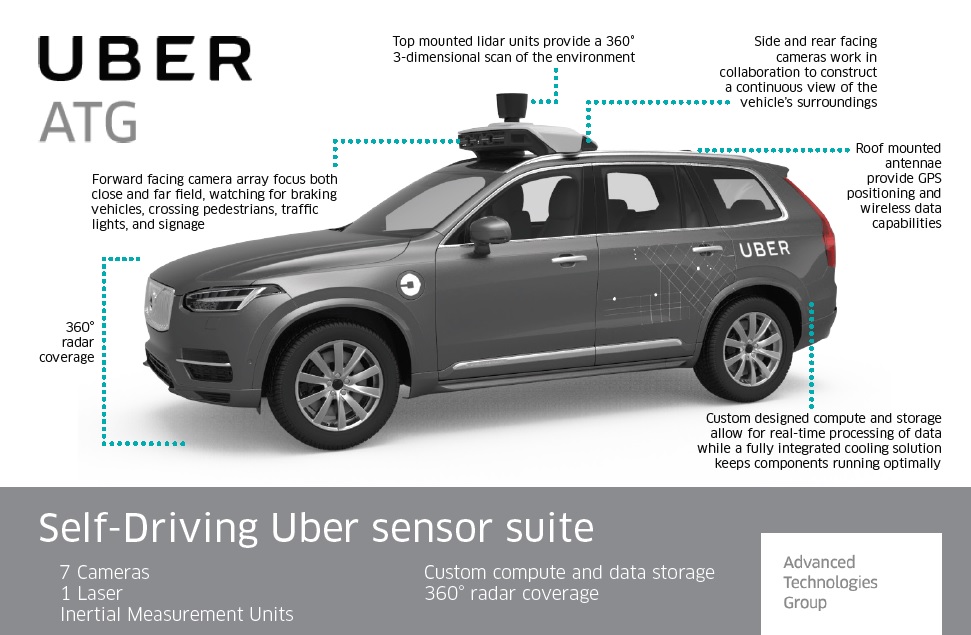
V současné době Uber používá dva druhy speciálně upravených vozidel – Ford Fusion a Volvo XC90, přičemž každé má několik kamer, GPS, LiDAR, popř. radar a další senzory (viz výše a níže). Pro jízdu používají vlastní mapy, které jsou tvořeny komerčně dostupným podkladem, na který jsou naložena data sesbíraná během testovacích jízd. Každou jízdou se tak rozšiřuje databáze, která ve finále vytvoří HD 3D mapu zvoleného města – v případě této reportáže Pittsburghu. Mapy jsou zatím dostupné pouze pro města, kde probíhá testování.
Uber zaměstnává více než 50 lidí z oblasti GIS či kartografie a neustále nabírá další, propojení s akademickým sektorem je viditelné například u Raquel Urtasun, vedoucí Uber ATG v Torontu a profesorky na University of Toronto (téměř 11 tisíc citací na Google Scholar). Jejím úkolem je vymyslet, jak vytvořit jednoduše podkladovou mapu pro jakékoliv město, podle které by samoříditelná auta mohla jezdi. V současné době, když auto vyjede mimo zónu Pittsburghu, stává se z něj „obyčejně“ auto a je plně závislé na řidiči. Operátor, jak se „řidičům“ samoříditelných aut říká, jezdí v průměru 8 hodin denně při 10 hodinové směně. Volvo SUV ve kterém jsem měl možnost se projet já je hybrid s tím, že většina senzorů, počítače na palubě, apod. jsou poháněny z elektrické části a motor jako takový je pohánět klasickým palivem.
Na samoříditelná Uber auta mohou cestující v Pittsburghu narazit docela běžně, po městě jich jezdí několik desítek a občas (spíše dříve, nyní již minimálně) vozily i cestující, kteří si jen tak přivolali Uber, což pro mnohé musel být docela slušný šok.
V čem je tedy jízda „samoříditelným“ autem jiná? V první řadě je potřeba definovat tu samoříditelnost, protože za volantem stále sedí člověk, který má ruce neustále okolo volantu, ale nedotýká se jej, v případě, kdyby auto přestalo řídit samo. Během mé asi 25 minutové jízdy jelo auto „samo“ tak cca 15-20 minut, ale v několika případech musel řízení převzít operátor – dodávka parkující uprostřed ulice vykládající zboží, komplikovaná křižovatka bez semaforu, zóna okolo školy, kde se snížená rychlost, ale jen v určité časy a Uber zatím nemá vymyšlené dočasné značky (např. snížení rychlosti jen ráno a v poledne) či náhlá změna cesty (rozhodli jsme se jet jinudy). Jakmile si byl však jist, že auto opět zvládne řídit samo, zmáčkl tlačítko a pustil volant. V autě jsou dva tablety, které fungují jako navigace pro operátora, ale i informace o cestě pro cestujícího. Ve chvílí, kdy je auto v autonomním režimu, tak tablet pro cestujícího se přepne do módu s daty z LiDARu.

Dalším zajímavým kouskem technologie je laptop na místě spolujezdce, kde se v reálném čase zobrazují veškerá data ze senzorů, chybové hlášky, apod. Tento laptop, na rozdíl od tabletů, které běží pod iOS, jede na Linuxu.
Závěrem lze jen říct, že to byla, po návštěvě VR centra Facebooku, druhé z velkých IT firem, kterou jsem měl možnost během svého pobytu v Pittsburghu navštívit, a je úžasné vidět, kde všude se geotechnologie používají. Zároveň děkuji Uberu, za možnost prohlídky jejich centra a jízdy.
